
愛知県の名古屋市にあるHisaya-odori Parkで行われたロボットの実証実験に2024年2月29日から3日間に渡り、参加いたしました。
実証実験を行ったロボットは「3Dスキャナー搭載自動走行ロボット」です。

放置自転車で悩む公園管理業務をサポートすべく、パーソルクロステクノロジー株式会社のカスタマイズによる自動走行ロボットに、弊社の3Dスキャナー「OWL(アウル)」を搭載して実証を行いました。
【実験の流れ】
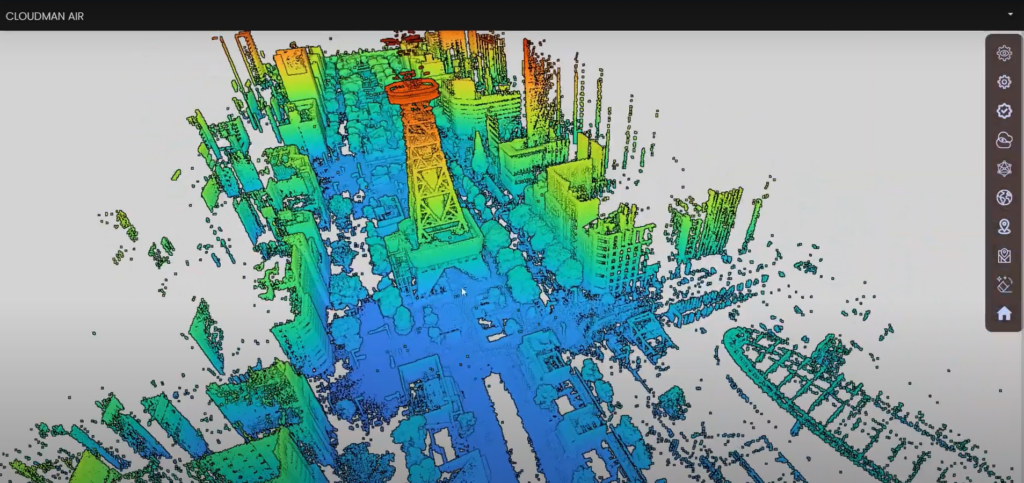
(1) 事前準備として公園内全体の精密な点群データを弊社の3Dマッピングスキャナ「MK3」で取得します。同時に高精度RTK-GNSS情報(*A)も取得し、点群データをグローバル座標に変換し、実証実験会場の正確な点群データを作成します。
(*A)RTK-GNSS情報はソフトバンク株式会社の「ichimill」を使用。
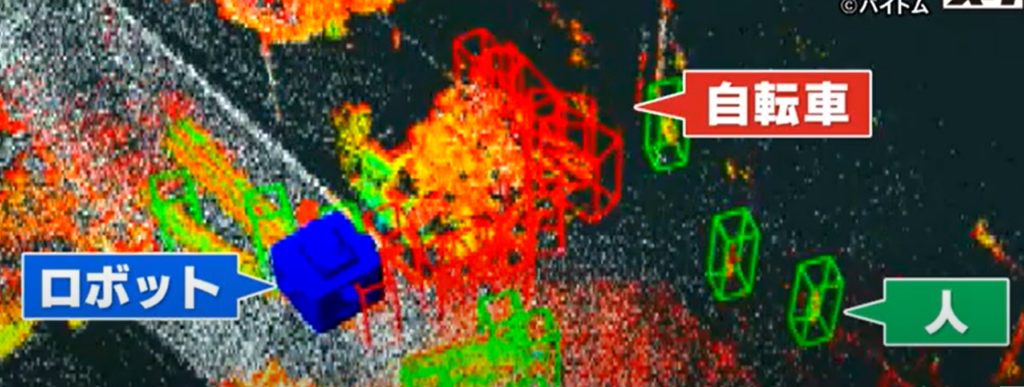
(2) 実証実験の本番では、公園内で自動走行するロボットに搭載された「OWL(アウル)」がローカライズとリアルタイムの物体検知を行います。

(3) 「OWL(アウル)」から得られたデータを、WiFi接続されたモバイルタブレット上で確認することができます。

【期待される効果】
ロボットが移動しながら公園内を巡回し、「OWL(アウル)」がセンシングとAIにより監視を行うことで警備員の人手不足を補うことができます。今回の実証実験では放置自転車と公園内の来場者を検知しましたが、センシングとAIを組み合わせることで、特定の物体の数を数えて、管理サーバー等に配信することが可能です。
遠隔で監視ができるという点で、人手不足を補うことができると期待されます。
【今後の課題】
弊社の開発した「OWL(アウル)」は、単体ではロボットを自律走行させることはできません。今後は「OWL(アウル)」で物体検知+遠隔監視+ロボットの自律走行を可能にするための開発を行っていきます。
【愛知TVで放映されました!】
今回の実証実験の内容について、愛知のテレビ局から取材を受け、ニュース番組内で放映されました。自動走行ロボットに搭載された「OWL(アウル)」が公園内を巡回する様子が下記URLからご覧いただけます。
URL: https://news.tv-aichi.co.jp/single.php?id=4327
【実証実験概要】
名称:AICHI ROBOT TRANSFORMATION 2023年度愛知県サービスロボット社会実装推進事業
期間:2024年2月29日~2024年3月2日
開催場所:Hisaya-odori Park
主催:愛知県 経済産業局産業部 産業振興課 次世代産業室
公式HP:https://aichirx.jp/
