Developed in Japan, built for infrastructure systems
Lightweight scanner weighing 1 kg
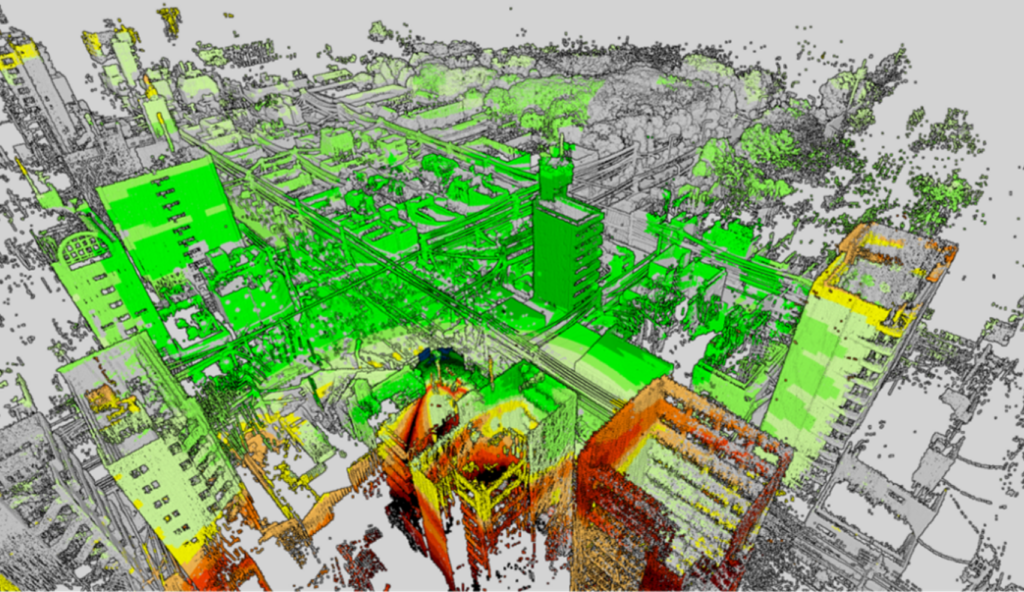
手持ち式スキャンとドローン搭載が可能
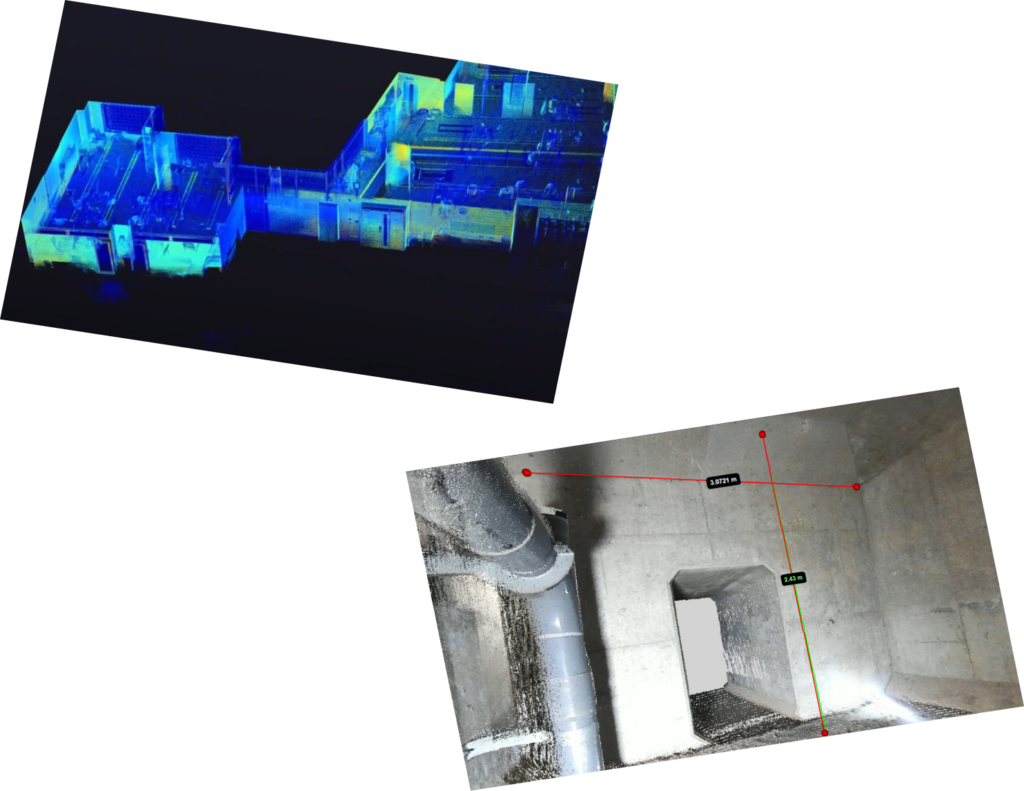
Supports real-time mapping and highly effective for field surveying
計測距離:70m
FOV: Horizontal 360°, Vertical 59°
Accuracy: 1 ~ 2cm
Scan rate: 200000 points/second
Processing: real-time
運用形態:手持ち式/ドローン
Weight: 1kg
Measurements: 248 mm (height) x 156 mm x 114 mm (width)
Can scan continuously for 60 minutes
What we do
We use 3D mapping technology to solve on-site problems caused by labor shortages and facilitate digital transformation.
Security
Construction
Forestry
Inspection
Communication
CLOUDMAN AIR
Digital Transformation
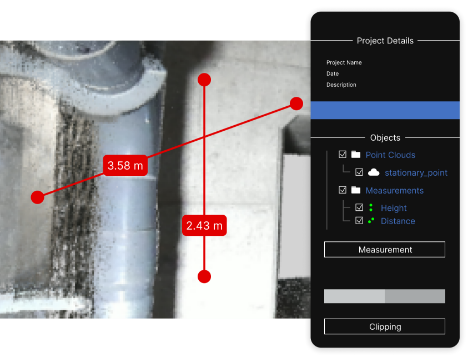
We solve various problems in fields impacted by labor shortage through the automation of existing work procedures. Through our spatial DX platform, "Cloudman Air", we are able to generate 3D maps and perform DX.
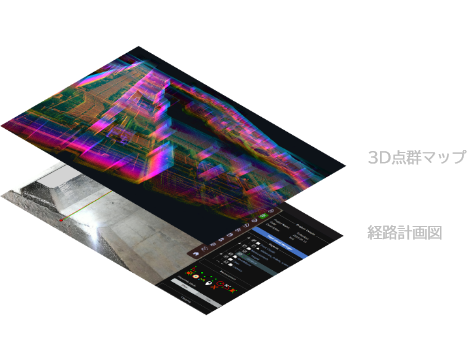
Demonstration of Cloudman Air autonomizing work procedures by reading 3D maps.
Load 3D point cloud data into Cloudman Air
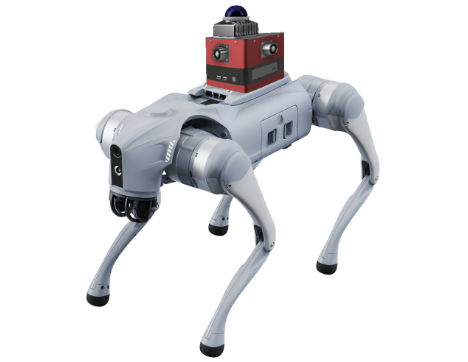
Cloudman Air sends 3D point cloud maps and route plans to OWL
When OWL reads the data, the robot runs autonomously.
Send the resulting spatial data to Cloudman Air
Use Case
Repair and Inspection Management System
By aggregating all data from inspection plans, site surveys, on-site measurements, and knock measurements into our DX platform, we automate the entire process - including the generation of comprehensive summary reports.
Use Case
5G mmWave Design Marketing System
By uploading 3D maps into the platform, we generate a coverage simulation for the 5G millimeter-wave band and store it in a database. This aggregated information allows operators to automate their marketing efforts to customers.
Please feel free to contact us regarding any concerns, including purchase, rental, and measurement requests. We also accept demonstration requests any time.
2営業日以内に、弊社スタッフよりご返答させていただきます。
Address
〒140-0013 Tokyo, Shinagawa City, Minamiōi, 6-chōme−16−4 Tonami Omori Building 2F