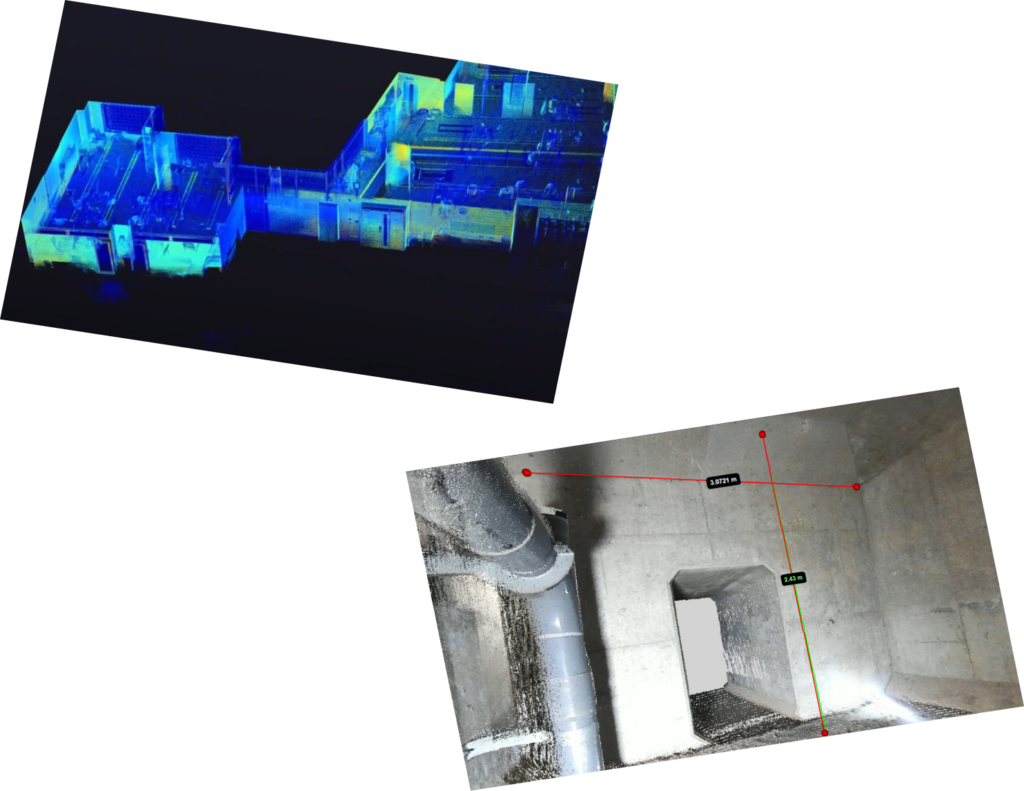
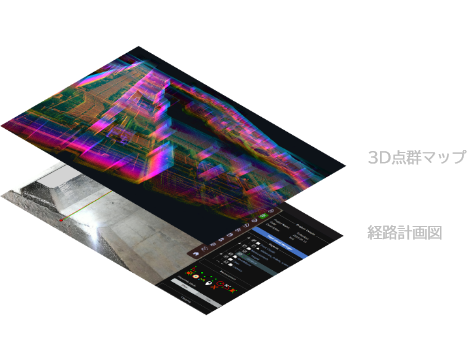
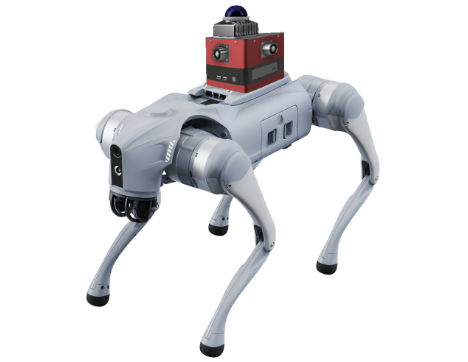
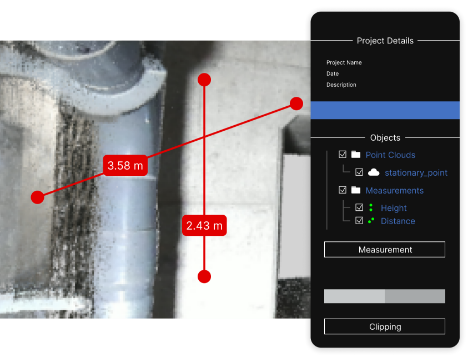
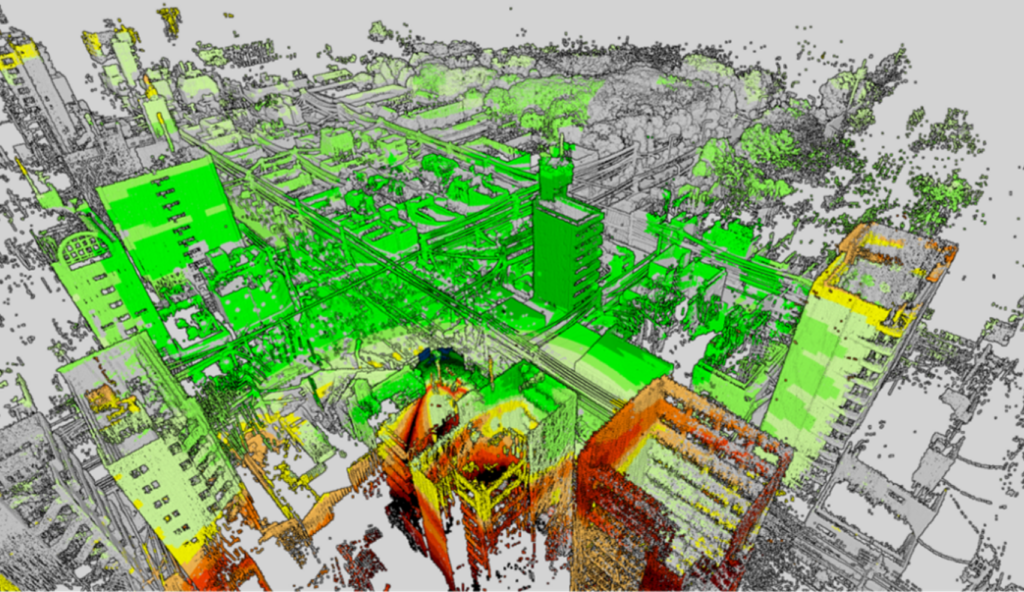
ビジネスに有益な 3次元マップ , スマート監視, 空間DXツール を提供 3次元スキャナー 製品紹介 手持ち式・時短・3D計測 MK3/エムケースリー 基盤システムの日本国内自社開発製品LiDARが360°自動で回転手持ち式・バックパックでのスキャンに対応リアルタイムマッピングに対応し狭い場所(トンネルなど)の計測に有効 計測距離:120mFOV(視界):360°精度:0.5~2cmスキャンレート:64万ポイント/秒処理:リアルタイム処理運用形態:手持ち式/バックパック/据置重量:1.8kg外形寸法:高さ356mm X 110mm X 104mm(横)連続使用時間: 120分 監視機能・物体検知・警備コスト削減 OWL/アウル 基盤システムの日本国内自社開発製品監視カメラより広い視野(360°)と距離(200Mまで)をカバー夜間でも監視可能物体検知と数量カウントをリアルタイムで実行管理室などからアウルへリモートアクセスすることで監視体制の構築 監視距離:120mFOV(視界):水平360°、垂直130°精度:1~2cmスキャンレート:64万ポイント/秒処理:リアルタイム処理運用形態:固定設置/移動式重量:2kg連続使用時間:12時間 ドローン対応・公共測量 ROBIN/ロビン 基盤システムの日本国内自社開発製品ドローン搭載可能小型・軽量公共測量要件に適応予定 計測距離:120mFOV(視界):水平360°、垂直31°精度:0.5~2cmスキャンレート:64万ポイント/秒処理:リアルタイム処理運用形態:UAV/手持ち式/バックパック重量:1.6kg外形寸法:高さ133mm X 134mm X 133mm(横)連続使用時間: 120分 手持ち式・持ち運びやすい・現地調査 PARROT/パロット 基盤システムの日本国内自社開発製品重さ 1kg の超小型ハンディスキャナ手持ち式スキャンとドローン搭載が可能リアルタイムマッピングに対応し現地調査などその場の環境を即座に計測したい場合に有効 計測距離:70mFOV(視界):水平360°、垂直59°精度:1~2cmスキャンレート:20万ポイント/秒処理:リアルタイム処理運用形態:手持ち式/ドローン重量:1kg外形寸法:高さ248mm X 156mm X 114mm(横)連続使用時間: 60分 バイトムが掲げる目標 バイトム株式会社は3次元マップを活用し、人手不足による現場の問題を解決する「自律産業」をリードする会社です。 警備 建設 森林 点検 通信 CLOUDMAN AIR 空間のDX化をサポート 生産性人口が減少する時代において、既存の作業手順を自律化させることで人手不足の現場の諸問題を解決します。バイトムの開発した「CLOUDMAN AIR」という空間DXプラットフォームを活用することで3次元マップを活用したDX化を行うことが可能です。 CLOUDMAN AIRは空間DXプラットフォームとして3次元マップを読み込むことで作業の手順を自律化させることが可能です。 3D点群データをCloudman Airに読み込み Cloudman Airから3D点群マップと経路計画図をアウルへ送信 アウルがデータを読み込むとロボットが自律走行 得られた空間データをCloudman Airに送信 適用可能な例 補修点検管理システム 作業の手順として点検計画から現場調査、現場測定、たたき計測のデータを全て空間DXプラットフォームに集約することで、多岐に渡るデータを取りまとめたレポート作成までのプロセス自律化を可能にします 適用可能な例 5Gミリ波設計マーケティングシステム 空間情報(3次元マップ)をプラットフォームに読み込ませることで5Gミリ波帯のカバレッジシミュレーションを作成しデータベース化します。その情報を集約して通信事業者が顧客に対するマーケティングを行うプロセスの自律化を可能にします 3次元スキャナー 画像比較 丸の内駅 自社開発の3次元スキャナーMK3を使って東京丸の内駅をスキャンし、色付き点群を生成しました。 秋葉原 MK3でスキャンし、色付き点群を生成したあと実際の写真と比較しました。 ニュース&リリース 【国内最大級の地図ビジネス展示会】ジオ展2025へ出展いたします! <追加説明会開催決定!>株式投資型クラウドファンディング実施および説明会開催のお知らせ ジオ展2024に出展しました ご購入・レンタル・計測サービスのご相談 デモ、実証実験等ご相談も随時承っております。お気軽にお問合せください 2営業日以内に、弊社スタッフよりご返答させていただきます。 住所 〒140-0013 東京都品川区南大井6-16-4戸浪大森ビル2階 プライバシーポリシー